北京津发科技股份有限公司
Kingfar International Inc
全国免费服务热线:
13021282218
13021282218
Kingfar International Inc

产品描述
Prescan自动驾驶仿真软件一、简介
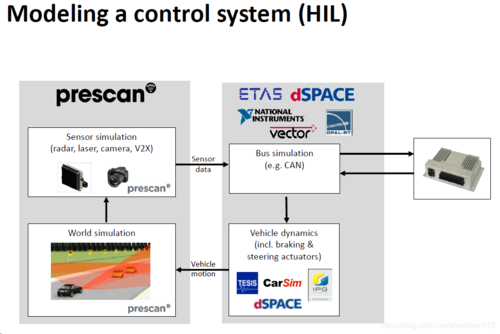
PreScan是德国Seimens西门子公司旗下汽车自动驾驶仿真软件产品,Prescan是以物理模型为基础,开发ADAS和智能汽车系统的自动驾驶仿真平台。支持摄像头、雷达、激光雷达、GPS,以及V2V/V2I车车通讯等多种应用功能的开发应用。 PreScan基于MATLAB仿真平台,主要用于(ADAS)汽车高级驾驶辅助系统和无人自动驾驶系统的仿真模拟软件,其包括多种基于雷达,摄像头,激光雷达,GPS,V2V和V2I车辆/车路通讯技术的智能驾驶应用。支持模型在环(MIL),实时软件在环(SiL),硬件在环(HiL)等多种使用模式。北京津发科技股份有限公司作为德国Siemens西门子公司正式签约合作伙伴,旨在进一步加深双方商业、技术合作,开辟新市场,为无人驾驶领域贡献积极力量。
二、软件概览
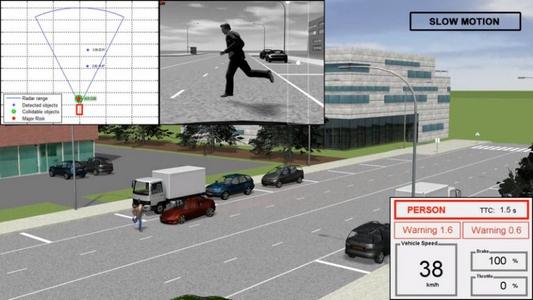
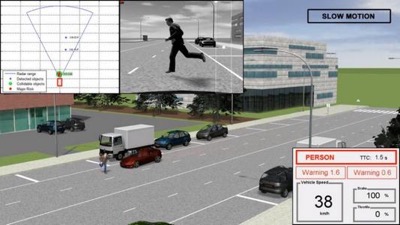
智能汽车自动驾驶仿真系统在PreScan中的仿真实现如下图所示。
智能驾驶仿真实现
特点
1. 场景工况
交通要素数据库 快速场景构建 Euro NCAP ×11 NHTSA ×12 ISO ×19 ADAC ×9 eValue ×4 Opendrive importer OSM importer IBEO importer GIDAS/CIDAS importer
2. 传感器&通讯
19种传感器类型包括
Mono camera
Stereo camera Fisheye camera Radar Lidar Ultrasonic Antenna Radio DSRC V2X Lane marker sensor Object sensor Depth sensor
3. Matlab Simulink
基于Matlab Simulink平台
4. 执行器&人机界面
车辆动力学模型
PreScan model Coupling to 3rd party model AMESim LMS Virtual.Lab Motion CarSim ………
三、详细功能
软件详细功能
特点描述
交通场景建模型
●Roads 道路模型
●Database of road types 道路数据库
●Environment 环境模型
●Road users 道路使用者
●Weather & Lights 天气光照
传感器模型
●Camera, fisheye, mono, stereo
摄像头、鱼眼、单目及双目摄像头
●Radar 毫米波雷达●Laser and lidar 激光雷达
●Ultrasonic 超声波雷达
●V2X sensors 车车/车路通讯传感器
●Ground truth sensors 真值传感器
●Ground truth Sensor 真值传感器
ADAS algorithm implementation 控制算法仿真集成
●Model in the Loop 模型在环
通过MatLab/Simulink平台,可以引入各种编程工具开发的算法代码。
●Hardware in the Loop 硬件在环
也可以直接引入ECU硬件,构成硬件在环试验台
Driver model驾驶员模型
●根据理想路径以及车辆当前位置计算车辆转角信号输出。
●根据理想速度以及车辆当前速度计算油门、刹车信号。不再遵循原先定义的路径。
●Driver in the loop 驾驶员在环
Vehicle actuation modelling
车辆执行器建模
●2D bicycle dynamics model 2D动力学模型
●3D two track dynamics model 3D动力学模型●6DOF sprung body à x, y, z, roll, pitch, yaw 六自由度车辆状态计算 ●Usage: on PreScan’s 3D roads (i.e. roads with a height profile) 适用PreScan 3D路面仿真
●3rd party dynamics model import 外部车辆动力学模型导入
Test Automation (TA) 自动化测试
●Select variables (GUI) 选择自动化测试参数●Set-up variables (MATLAB) 使用模板编写自动化测试脚本
●Run test automation script (MATLAB) 运行脚本
●Compare results (MATLAB) 获得自动化测试报告
Demos
●PreScan标准安装包自带128 个demo场景,所有的场景模型以及系统控制算法完全对用户 开放
●PreScan标准安装包自带19个智能驾驶系统传感器
●PreScan标准安装包自带30多个智能控制算法模型,所有系统控制算法完全对用户开放、可编辑修改
●PreScan标准安装包自带43个交通道路参与者及执行器,并支持导入用户自定义的第三方3D模型
●PreScan标准安装包自带134个ADAS仿真系统模型,这些案例所含的场景模型、系统控制算法、执行器模型完全对用户开放
功能插件
●大规模交通流自动生成器●IBEO扫描数据自动转换为PreScan仿真场景
●IBEO扫描数据自动转换为PreScan仿真场景
●摄像头物理模型●基于统计学性能的雷达模型
●GIDAS事故数据库自动导入PreScan仿真场景
●升级版车车通讯传感器模型
●PreScan和PTV Vissim软件耦合计算
四、应用案例
1.MCity使用PreScan验证测试场设计
2.车道保持系统硬件在环(HIL)测试平台
3.自动驾驶系统硬件在环(HIL)测试平台
4.自适应巡航/自动紧急制动系统ViL测试平台
5.基于Nvidia PX的人工智能硬件在环测试平台
手机网站

微信号码
地址:北京市 海淀区 海淀街道 北京海淀
联系人:彭经理女士(经理)
微信帐号:13021282218